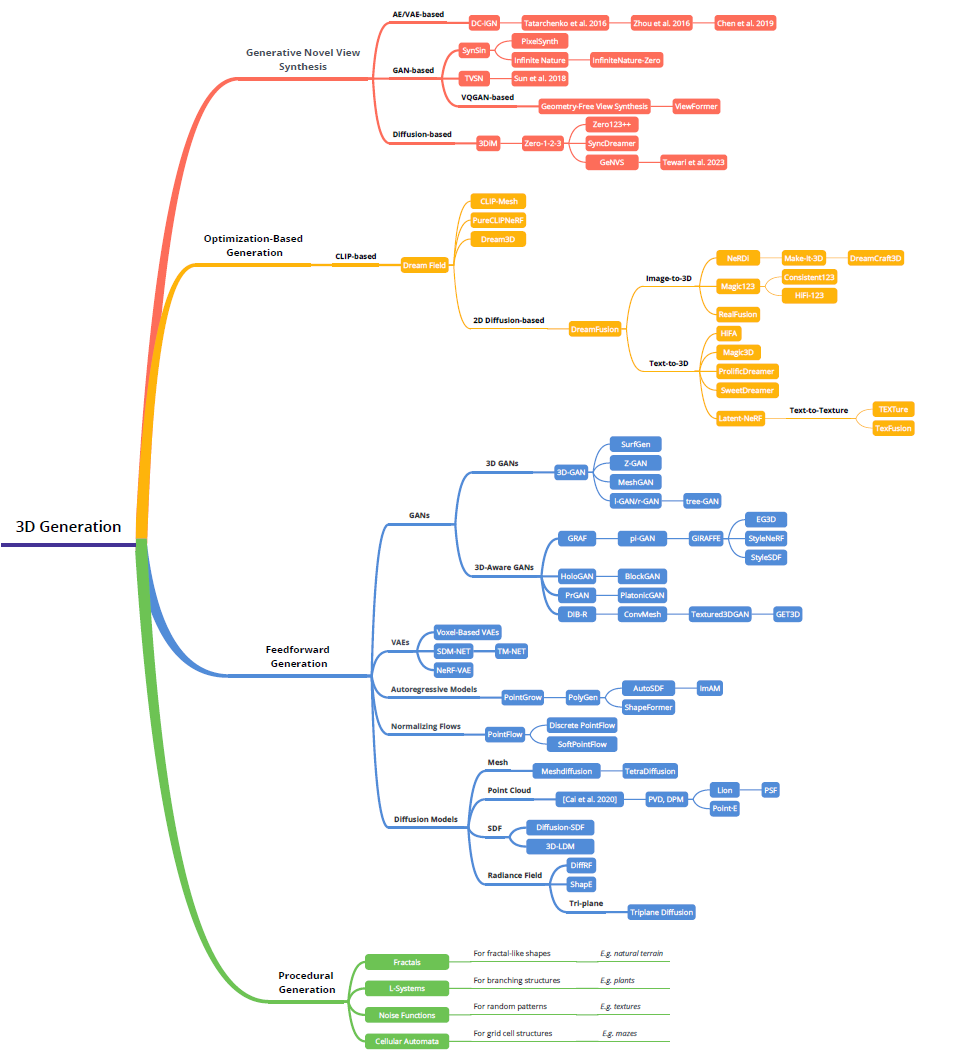
3D Rendering
Background
- 场景重建:涉及从图像或其他数据的集合创建场景的3D模型。
- 渲染:是一个更具体的术语,专注于将计算机可读信息(例如,场景中的3D对象)转换为基于像素的图像。
- 神经渲染:神经渲染将深度学习与传统图形技术相结合,以创建照片级真实感图像。早期的尝试使用卷积神经网络(CNNs)来估计混合权重或纹理空间解决方案。
- 辐射场:表示一个函数,该函数描述了通过空间中每个点在每个方向上传播的光量。NeRFs使用神经网络对辐射场进行建模,从而实现详细逼真的场景渲染。
- 体积表示:体积表示不仅将目标和场景建模为曲面,还将其建模为填充了材质或空白空间的体积。这种方法可以更准确地渲染雾、烟或半透明材料等现象。
- Ray-Marching:是一种与体积表示一起使用的技术,通过增量跟踪穿过体积的光的路径来渲染图像。NeRF分享了体积射线行进的相同精神,并引入了重要性采样和位置编码来提高合成图像的质量。在提供高质量结果的同时,体积射线行进在计算上是昂贵的,这促使人们寻找更有效的方法,如3D GS。
- 基于点的渲染:基于点的渲染是一种使用点而不是传统多边形来可视化3D场景的技术。这种方法对于渲染复杂、非结构化或稀疏的几何数据特别有效。点可以用额外的属性来增强,如可学习的神经描述符,并有效地渲染,但这种方法可能会遇到诸如渲染中的漏洞或混叠效应等问题。3D GS通过使用各向异性高斯来扩展这一概念,以实现场景的更连续和更有凝聚力的表示。
Overview
- 辐射场:辐射场是三维空间中光分布的表示,它捕捉光如何与环境中的表面和材料相互作用。从数学上讲,辐射场可以描述为函数,其中将空间中的一个点和由球面坐标指定的方向映射到非负辐射值。辐射场可以通过隐式或显式表示进行封装,每种表示都具有特定的场景表示和渲染优势。
- 隐式辐射场:隐式辐射场表示场景中的光分布,而不明确定义场景的几何体。在深度学习时代,它经常使用神经网络来学习连续的体积场景表示。最突出的例子是NeRF。在NeRF中,MLP网络用于将一组空间坐标和观看方向映射到颜色和密度值。任何点的辐射度都不是明确存储的,而是通过查询神经网络实时计算的。因此,函数可以写成:

这种格式允许对复杂场景进行可微分和紧凑的表示,尽管由于体积光线行进,渲染过程中的计算负载往往很高。
- 显式辐射场:相反,显式辐射场直接表示离散空间结构中的光分布,例如体素网格或点集。该结构中的每个元素存储其在空间中的相应位置的辐射信息。这种方法允许更直接且通常更快地访问辐射数据,但代价是更高的内存使用率和潜在的更低分辨率。显式辐射场表示的一般形式可以写成:

其中DataStructure可以是网格或点云,是基于观看方向修改辐射的函数。
- 两全其美的3D Gaussian Splatting:3D GS表示从隐式辐射场到显式辐射场的转变。它通过利用3D高斯作为灵活高效的表示,利用了这两种方法的优势。这些高斯系数经过优化,可以准确地表示场景,结合了基于神经网络的优化和显式结构化数据存储的优点。这种混合方法旨在通过更快的训练和实时性能实现高质量渲染,特别是对于复杂的场景和高分辨率输出。3D高斯表示公式化为:

传统方法
早期的技术基于光场生成逼真的图像,后期
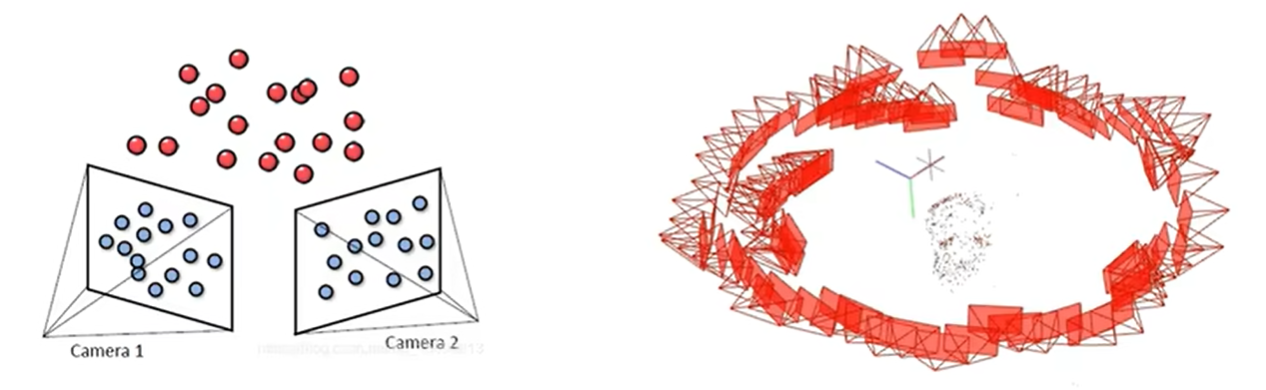
- structure-from-motion(SfM)
- MultiView Stereo多视图立体(MVS)算法
通过从图像序列估计3D结构进一步推进了这一领域。
典型的神经场算法在视觉计算中如下:
- 通过时空采样坐标并把它们送入神经网络产生预测的重建场量。
- 应用前向地图将重建场量与传感器域(如RGB图像)对应起来,计算重建误差。
- 更新神经网络。
NeRF-Based, 2020
- ECCV Best paper
- 通过隐式建模将场景建模为连续的辐射场,任何点的辐射度都不是明确存储的,而是通过查询神经网络实时计算的。因此可以实现任意分辨率的建模和渲染
- 通过为每个3D位置分配一个密度值来提升透明半透明物体的渲染能力
NeRF的局限性,主要包括:- 计算成本高:任何点的辐射度都不是明确存储的,而是通过输入至神经网络实时计算的。
- 处理反射和透明度复杂的物体困难:虽然
NeRF可以处理一些反射和透明度的效果,但对于具有复杂反射和透明度的物体
- 需求高质量的输入数据训练且训练时间长
 https://mp.weixin.qq.com/s?__biz=MzkyMTUwMTU5Mg==&mid=2247484754&idx=1&sn=b95863155ecf7a7537cd45836598925e&chksm=c183efa5f6f466b3c63d2a4d0dbaca076ac1148c76c8cab58365471823c06339c0c11bed9496&token=752429925&lang=zh_CN#rd
https://mp.weixin.qq.com/s?__biz=MzkyMTUwMTU5Mg==&mid=2247484754&idx=1&sn=b95863155ecf7a7537cd45836598925e&chksm=c183efa5f6f466b3c63d2a4d0dbaca076ac1148c76c8cab58365471823c06339c0c11bed9496&token=752429925&lang=zh_CN#rd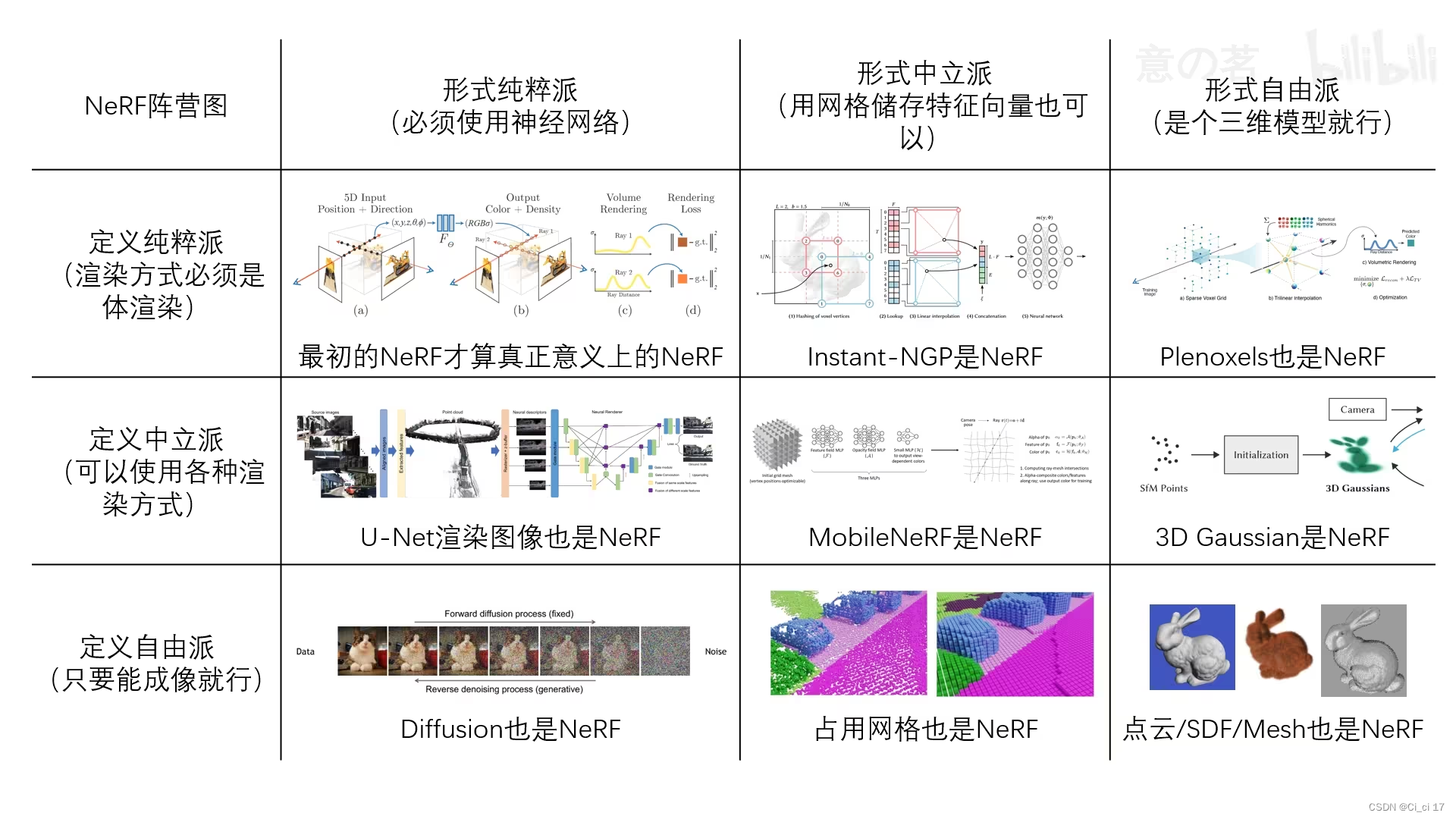
3D Gaussian Splatting 抛雪球
- 结合隐式(不明确定义场景几何体,对场景中的光/材质分布等建模)和显式(对空间中每个位置的信息建模)辐射场。
- 更快的训练和实现的高质量渲染
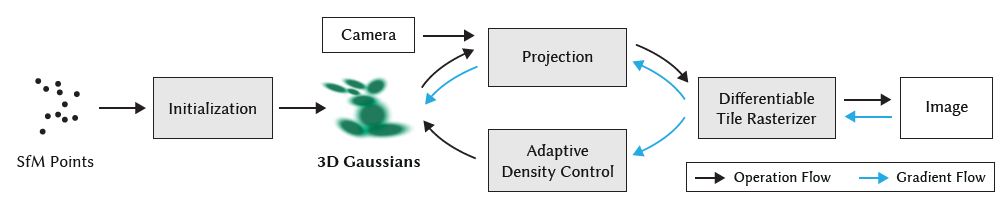
- 输入:考虑一个由(数百万)优化的3D高斯表示的场景。
- 投影到基于像素的图像平面上:splatting
- 排序,并计算每个像素的值。
- 3D GS的核心是一个优化过程,旨在构建大量的3D高斯集合,准确捕捉场景的本质,从而促进自由视点渲染。


Data
数据集包含,
- Image:场景图片,一组从不同视角拍摄的场景照片,groundtruth
- Camera extrinsic:每张照片的坐标变换(3D世界坐标 to 3D相机坐标 to 2D图像平面坐标)信息(q、t),3D to 3D可逆,3D to 2D不可逆变换,因为缺少了深度信息
- Camera intrinsic:内参,所有图像共享,完成2D图像平面坐标 to 2D传感器坐标的坐标变换,可逆。
Preprocess
Transformation
- Overall, 从目标的世界坐标系3D,转换到相机坐标系3D,然后转换到图像平面坐标系2D(图像物理坐标),最后转换到传感器坐标系2D(图像像素坐标)。转换的矩阵关系为(world 2 camera 2 image 2 sensor coordinate system):
- 首先,world 2 camera,都是3D坐标系,可逆的刚体变换,包含平移和旋转变换,6个自由度()
- 刚体变换
为相机相对于世界坐标的平移向量,即相机光心在世界坐标系中的位置为
- 用齐次坐标的形式表示,给每个坐标点增加一维坐标,能非常方便的表达点在直线或平面上,点坐标与法向量的内积为零
- 因此,world 2 camera
- 刚体变换
- camera 2 image,在x和y方向是重合的,只是z轴的缩放,根据针孔成像原理,通过焦距focal length控制缩放,并写成齐次坐标的形式。
- image 2 sensor,传感器坐标系的初始原点一般不是平面的中心点。有一个小的位移,一般还包括了剪切和尺度的变换。
- 因此,汇总可得,从世界坐标空间到图像像素空间(sensor space)的相机坐标变换表示为
SfM initialization, Structure from Motion
可以直接调用 COLMAP 库来完成这一步,当无法获得点云时,可以使用随机初始化来代替,但可能会降低最终的重建质量和收敛速度。SfM 初始化点云过程的主要步骤如下:
- 对每一张图像,使用 SIFT、SURF、ORB 等算法提取特征点,并计算特征描述子。
- 对相邻的图像,使用 KNN、FLANN 等算法进行特征匹配,筛选出满足一致性和稳定性的匹配对。
- 对匹配的特征点,使用 RANSAC、LMedS 等算法进行异常值剔除,提高匹配的准确性。
- 对匹配的特征点,使用多视图几何的约束,如基础矩阵、本质矩阵、单应矩阵等,进行相机位姿的估计,以及三维坐标点的三角化。
- 对估计的相机位姿和三维坐标点,使用 BA(Bundle Adjustment)等算法进行优化,以减少重投影误差和累积误差。
Model parameter
每个高斯椭圆面的参数,包括
- 中心点坐标:
- 椭球形状shape(使用协方差矩阵表示旋转偏移等,越大,椭圆形状越大),使用旋转矩阵和缩放矩阵表示:其中,
- 旋转矩阵使用旋转四元数q表示 ,
- 缩放变量即一个列向量
- 不透明度:
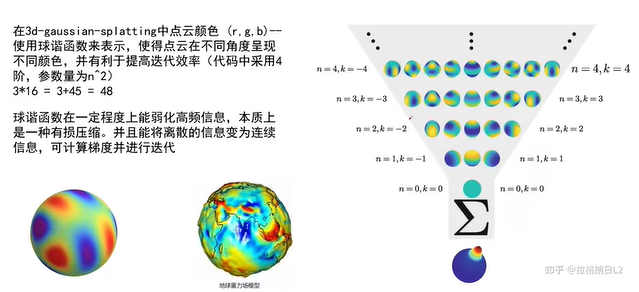
- RGB三个通道,每个通道使用四阶球谐函数(Spherical Harmonics,SH)表示颜色(可获得比较平滑的连续的颜色变化),因此每个通道有16个待学习参数,表示为
Projection
将点云投影到对应的成像平面,获得投影后的新不透明度,以及椭球投影到平面后的形状,用于光栅化渲染
- 为transform过程的世界空间到相机空间的仿射变换(外参):推理时只要获取对应novel view的外参矩阵,就能获得render的image
- 为相机空间到图像空间的变换(内参)的雅可比矩阵,是EWA splatting里提出一种办法,他们称其为“local affine approximation”,可以作线性近似,进行二阶泰勒展开,出现的雅可比矩阵会自然的提供一个线性变换
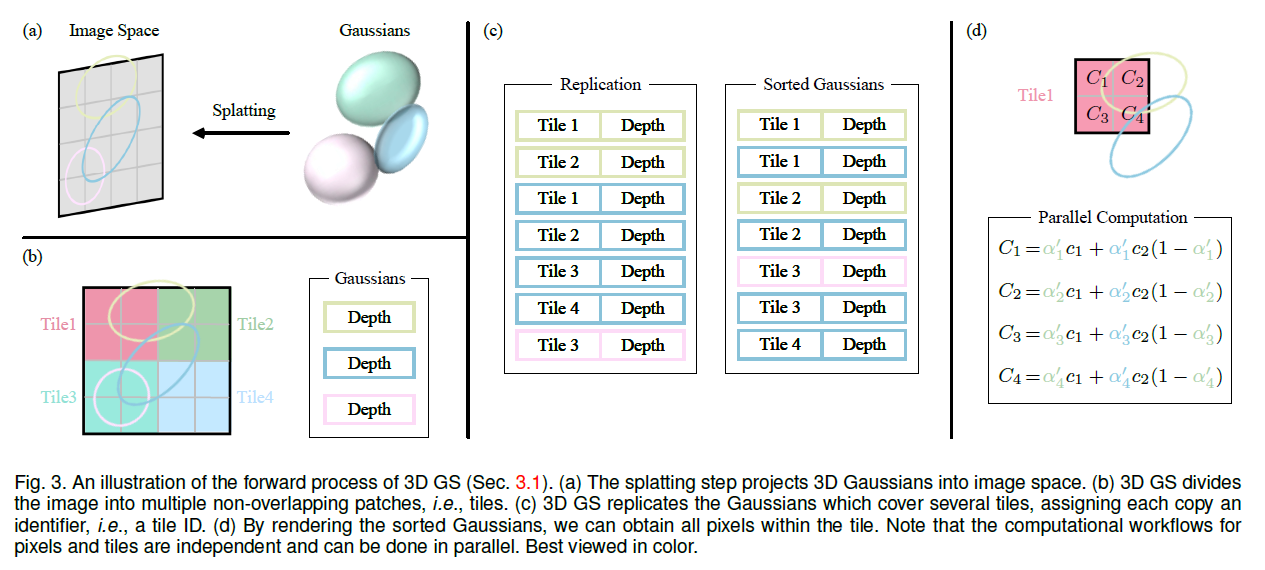
Rasterization
Tile
通过分块的方式加速渲染,而不是检索每个图像空间的像素级别
- 每个砖块包括 16 x 16 个像素。
- 识别出哪些砖块与特定的高斯投影相交,
- 考虑到一个高斯投影可能会覆盖多个砖块,一种有效的处理方式是复制这个东西,并为每个复制出的高斯分配一个唯一的标识符
- 通过这种方式,3DGS 能有效地降低计算复杂度,同时还保持了图像处理的效率和准确性。
排序 & alpha blending
- 给定像素位置x,通过视图变换W,计算与所有重叠高斯体的距离,即这些高斯体的深度,并从大到小排序,共包含N个椭球,越远的椭球重要性越低,累乘的衰减越多
- 进行Alpha Blending,计算整体图像每个像素点的最终颜色:
raster_settings = GaussianRasterizationSettings(
image_height=int(viewpoint_camera.image_height),
image_width=int(viewpoint_camera.image_width),
tanfovx=tanfovx,
tanfovy=tanfovy,
bg=bg_color,
scale_modifier=scaling_modifier,
viewmatrix=viewpoint_camera.world_view_transform,
projmatrix=viewpoint_camera.full_proj_transform,
sh_degree=pc.active_sh_degree,
campos=viewpoint_camera.camera_center,
prefiltered=False,
debug=pipe.debug
) # 每张图片分别渲染
self._xyz = nn.Parameter(torch.tensor(xyz, dtype=torch.float, device="cuda").requires_grad_(True))
self._features_dc = nn.Parameter(torch.tensor(features_dc, dtype=torch.float, device="cuda").transpose(1, 2).contiguous().requires_grad_(True))
self._features_rest = nn.Parameter(torch.tensor(features_extra, dtype=torch.float, device="cuda").transpose(1, 2).contiguous().requires_grad_(True))
self._opacity = nn.Parameter(torch.tensor(opacities, dtype=torch.float, device="cuda").requires_grad_(True))
self._scaling = nn.Parameter(torch.tensor(scales, dtype=torch.float, device="cuda").requires_grad_(True))
self._rotation = nn.Parameter(torch.tensor(rots, dtype=torch.float, device="cuda").requires_grad_(True))
自适应密度控制
- 点密集化:针对在视图空间中具有较大位置梯度(即超过特定阈值)的高斯,克隆小高斯或在过度重建的区域分裂大高斯。这一步旨在于 3D 空间中寻求高斯的最佳分布和表示,增强重建的整体质量。
- 对于克隆,创建高斯的复制体并朝着位置梯度移动。
- 对于分裂,用两个较小的高斯替换一个大高斯,按照特定因子减小它们的尺度
- 点的剪枝:
- 移除冗余或影响较小的高斯,可以在某种程度上看作是一种正则化过程。
- 一般消除几乎是透明的高斯(α低于指定阈值)和在世界空间或视图空间中过大的高斯。
Loss
Combination of L1 loss (absolute of MAE) and D-SSIM(structural similarity index measure) loss,结构相似性
def _ssim(img1, img2, window, window_size, channel, size_average=True) : # gaussian kernel window
mu1 = F.conv2d(img1, window, padding=window_size // 2, groups=channel)
mu2 = F.conv2d(img2, window, padding=window_size // 2, groups=channel)
mu1_sq = mu1.pow(2)
mu2_sq = mu2.pow(2)
mu1_mu2 = mu1 * mu2
sigma1_sq = F.conv2d(img1 * img1, window, padding=window_size // 2, groups=channel) - mu1_sq
sigma2_sq = F.conv2d(img2 * img2, window, padding=window_size // 2, groups=channel) - mu2_sq
sigma12 = F.conv2d(img1 * img2, window, padding=window_size // 2, groups=channel) - mu1_mu2
C1 = 0.01 ** 2
C2 = 0.03 ** 2
ssim_map = ((2 * mu1_mu2 + C1) * (2 * sigma12 + C2)) / ((mu1_sq + mu2_sq + C1) * (sigma1_sq + sigma2_sq + C2))
if size_average:
return ssim_map.mean()
else:
return ssim_map.mean(1).mean(1).mean(1)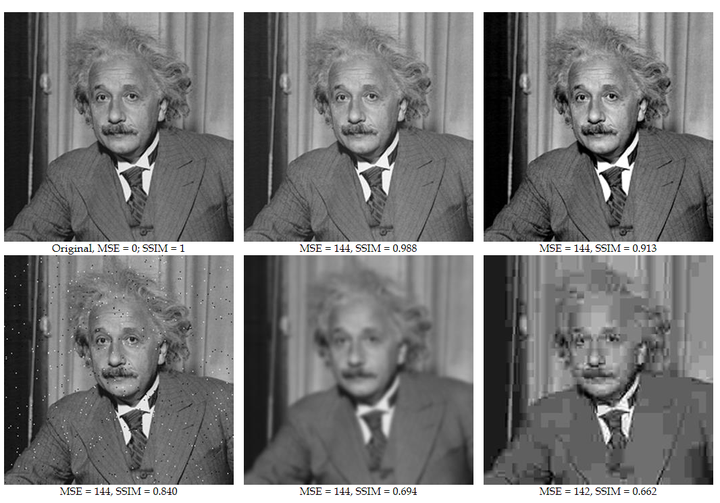
Optimizer
train: Adam
Evaluation: EMA
一句话总结权重滑动平均(Exponential Moving Average)就是:Copy一份模型所有权重(记为Weights)的备份(记为EMA_weights),训练过程中每次更新权重时同时也对EMA_weights进行滑动平均更新,训练阶段结束后用EMA_weights替换模型权重进行预测。
具体地,EMA的超参decay一般设为接近1的数,从而保证每次EMA_weights的更新都很稳定。每batch更新流程为:
Weights=Weights+LR*Grad; (模型正常的梯度下降)
EMA_weights=EMA_weights*decay+(1-decay)*Weights; (根据新weight更新EMA_weights)
应用领域
- SLAM(Simultaneous localization and mapping)即同时定位与建图,它根据对环境的局部观察构建环境全局模型。
- 动态场景建模
- 自动驾驶
- AIGC