Fused Kernel
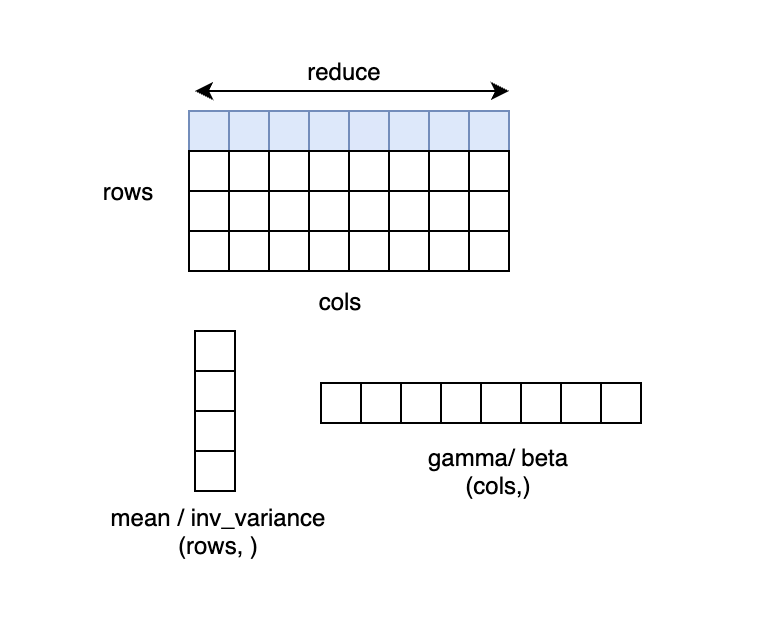
(num_rows, num_cols),计算过程中对每一行的元素做 Reduce 操作求均值方差。减少对global memory的访问次数LayerNorm
众多框架均对算子做了优化,如:
- NVIDIA Apex
- Pytorch
- OneFlow
LayerNorm 计算方法
以 PyTorch 为例,LayerNorm 的接口为:
torch.nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True, device=None, dtype=None)
- 其中
input形状为:[∗, normalized_shape[0], normalized_shape[1], …,normalized_shape[−1]]
- 第一个参数
normalized_shape只能是输入x_shape的后几维,例如x_shape为(N, C, H, W),normalized_shape可以是(W),(H, W),(C, H, W)或(N, C, H, W)。输入x在normalized_shape这几维上求均值和方差。
- 第三个参数
elementwise_affine代表是否要对 normalize 的结果做变换,即 normalize 的结果乘gamma,加beta。若elementwise_affine=True,就多了两个模型参数gamma和beta,形状为normalized_shape。
x 形状为 (N, C, H, W), normalized_shape 为 (H, W) 的情况,可以理解为输入 x 为 (N*C, H*W),在 N*C 个行上,每行有 H*W 个元素,对每行的元素求均值和方差,得到 N*C 个 mean 和 inv_variance,再对输入按如下 LayerNorm 的计算公式计算得到 y。若 elementwise_affine=True(default) ,则有 H*W 个 gamma(weight) 和 beta(bias),对每行 H*W 个的元素做变换。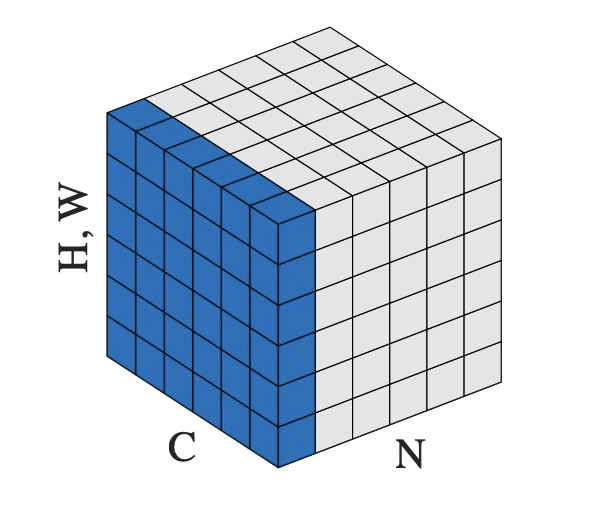
LayerNorm 中求方差的方法
常见的求方差的方法有 two pass 方法、naive 方法、和 Welford 算法,本文摘录一些关键的公式和结论,详细的介绍和推导可参考:Wiki: Algorithms for calculating variance ,和 GiantPandaCV: 用Welford算法实现LN的方差更新
- two-pass方法
使用的公式是:
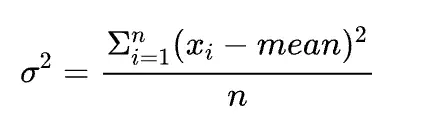
two-pass 是指这种方法需要遍历两遍数据,第一遍累加 x 得到均值,第二遍用上面公式计算得到方差。这种方法在 n 比较小时仍然是数值稳定的。
- naive方法
使用的公式是:

这种方法是一种 single pass 方法,在计算方差时只需要遍历一遍数据累加 x 的平方及累加 x,最后按上述公式计算得到方差。这种方法只需要遍历一遍数据,相比 two-pass 的算法,更容易达到好的性能,但是上面的 Wiki 参考链接中介绍由于 SumSquare 和 (Sum×Sum)/n 可能非常接近,可能会导致计算结果损失精度较大,因此这种方法不建议在实践中使用。
- Welford 算法使用的公式是:
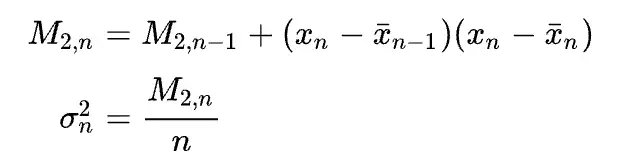
Welford 算法也是一种 single pass 方法(计算均值和方差时只需要遍历一遍数据),且数值稳定性很好(n比较小时),因此现在很多框架都采用这种方法。本文的代码中采用的也是 Welford 方法。
优化计算
背景:transformer中通常对最后一维计算normalization
- base:向量化访存VMA,单次instruction以更高的bits精度访问和存储数据,提高 CUDA Kernel 性能,很多 CUDA Kernel 都是bandwidth bound的,使用VMA可以减少总的指令数,减少延迟,提高带宽利用率。
load and store data but do so in 64- or 128-bit widths. Using vectorized loads reduces the total number of instructions, reduces latency, and improves bandwidth utilization.
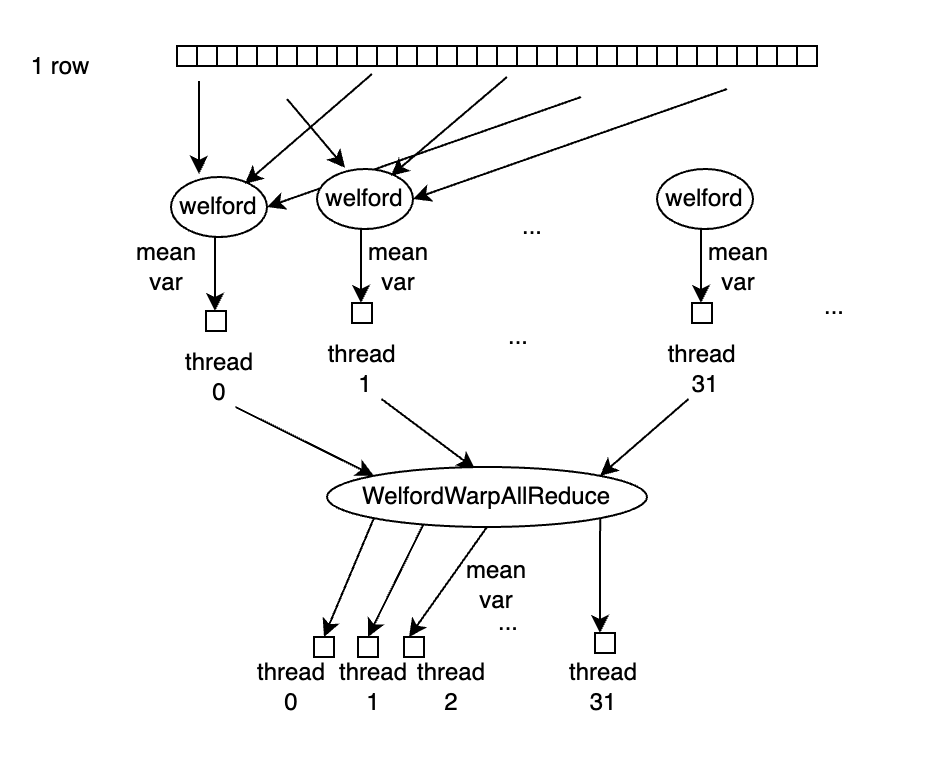
- 当normalized shape/hidden size不大时,充分利用shared memory保存中间的allreduce结果;根据n_col的大小决定以warp还是block为单位计算均值和方差;通过一次allreduce更新所有thread的计算结果。
- 使用single pass的Welford 算法计算均值和方差,减少数据遍历次数,且数值稳定性很好
 https://developer.nvidia.com/blog/cuda-pro-tip-increase-performance-with-vectorized-memory-access/
https://developer.nvidia.com/blog/cuda-pro-tip-increase-performance-with-vectorized-memory-access/

Softmax
- 尽管当Softmax和CrossEntropy联合使用时,其数学推导可以约简,简化计算
- 但还是有很多场景会单独使用Softmax Op,如计算attention map时
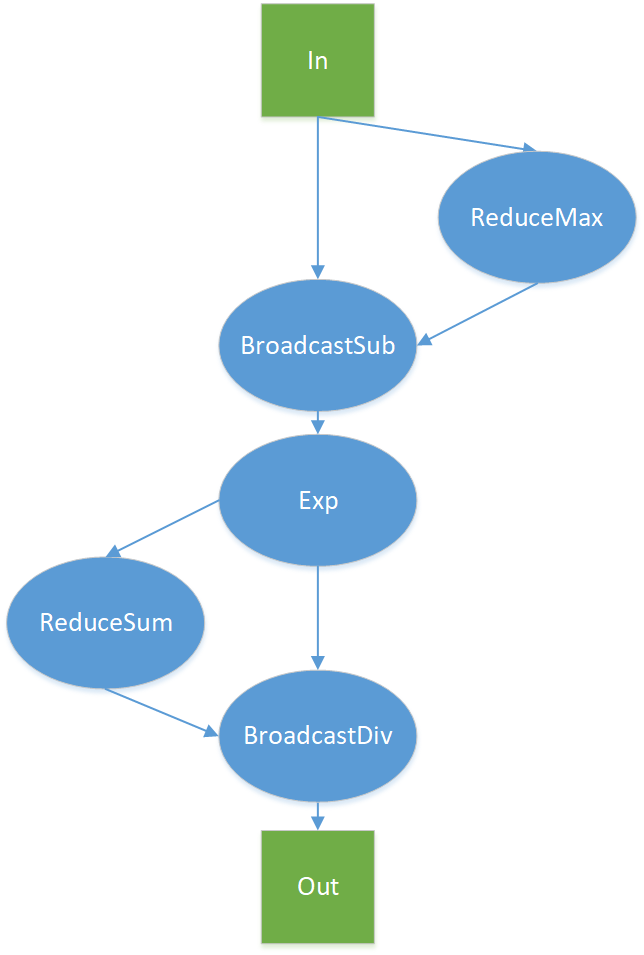
Naive Softmax (注:先减最大值,防止梯度爆炸?):
- 先做一个 ReduceMax 求最大值操作,得到输入每一行的最大值;
- 然后做一个 BroadcastSub 减法操作,拿输入每一行的各点减去每一行的最大值,即常见的softmax表达式中的输入x;
- 然后做一个 自然指数 Exp 操作,对输入每一行的各点计算指数;
- 然后做一个 ReduceSum 求和操作,对输入每一行的所有结果求和,得到前面公式定义的 ;
- 最后做一个 BroadcastDiv 除法操作, 拿输入每一行的各点的输出;
假设输入的数据大小为D,shape = (num_rows, num_cols), 即 D = num_rows * num_cols,最Navie的操作会多次访问Global memory,其中:
- ReduceMax =
D + num_rows(read 为 D, write 为 num_rows)
- BroadcaseSub =
2 * D + num_rows(read 为 D + num_rows,write 为 D)
- Exp =
2 * D(read 、write 均为D)
- ReduceSum =
D + num_rows(read 为 D, write 为 num_rows)
- BroadcastDive =
2 * D + num_rows(read 为 D + num_rows, write 为 D)
总共需要8 * D + 4 * num_rows 的访存开销。由于num_rows相比于D可以忽略,则Navie版本的Softmax CUDA Kernel需要访问至少8倍数据的显存,即: $$ Naive Softmax Kernel 有效显存带宽 < 理论带宽 / 8 $$ 对于GeForce RTX™ 3090显卡,其理论带宽上限为936GB/s,那么Navie版本的Softmax CUDA Kernel利用显存带宽的上界就是936 / 8 = 117 GB/s。
OneFlow实现
与LayerNorm,核心思想一致,如何更高效的处理行计算,分段对 softmax 进行优化:
(1) 一个 Warp 处理一行的计算,适用于 num_cols <= 1024 情况
(2) 当num_cols中等时,一个 Block 处理一行的计算,借助 Shared Memory 保存中间结果数据,1024 < num_cols <= 4096
(3) 当num_col很大时,一个 Block 处理一行的计算,不使用 Shared Memory,重复读输入 x
(4) 向量化访存
Pytorch实现
与OneFlow的前两种一致,分别对应cunn_SoftMaxForward,和softmax_warp_forward;

Bias_GeLU
不同的框架对激活函数的实现可能不完全一样,主要原因是从优化前向反向计算量与复杂度、优化内存访问频率的带宽利用率、提升数值计算结果稳定性角度考虑。
例如,GeLU的实现:
- 原始:
- BERT:
与Layernorm和softmax,也是涉及在高维的hidden size维度求指数、求和的操作,fused kernel思路一致。
- 根据维度选择不同的并行粒度计算
- 利用shared memory提高访存速度
- VMA